Projet de radar avec le NXT 2.0
|
Le projet initial était trop ambitieux vu les connaissances actuelles, faire un robot autonome qui se déplace dans un environnement inconnu et qui en créerait la carte. Donc pour commencer je vais faire un simple radar qui scanne autour du robot et qui dessine l'image de l'espace libre autour de lui. |
 |
 |
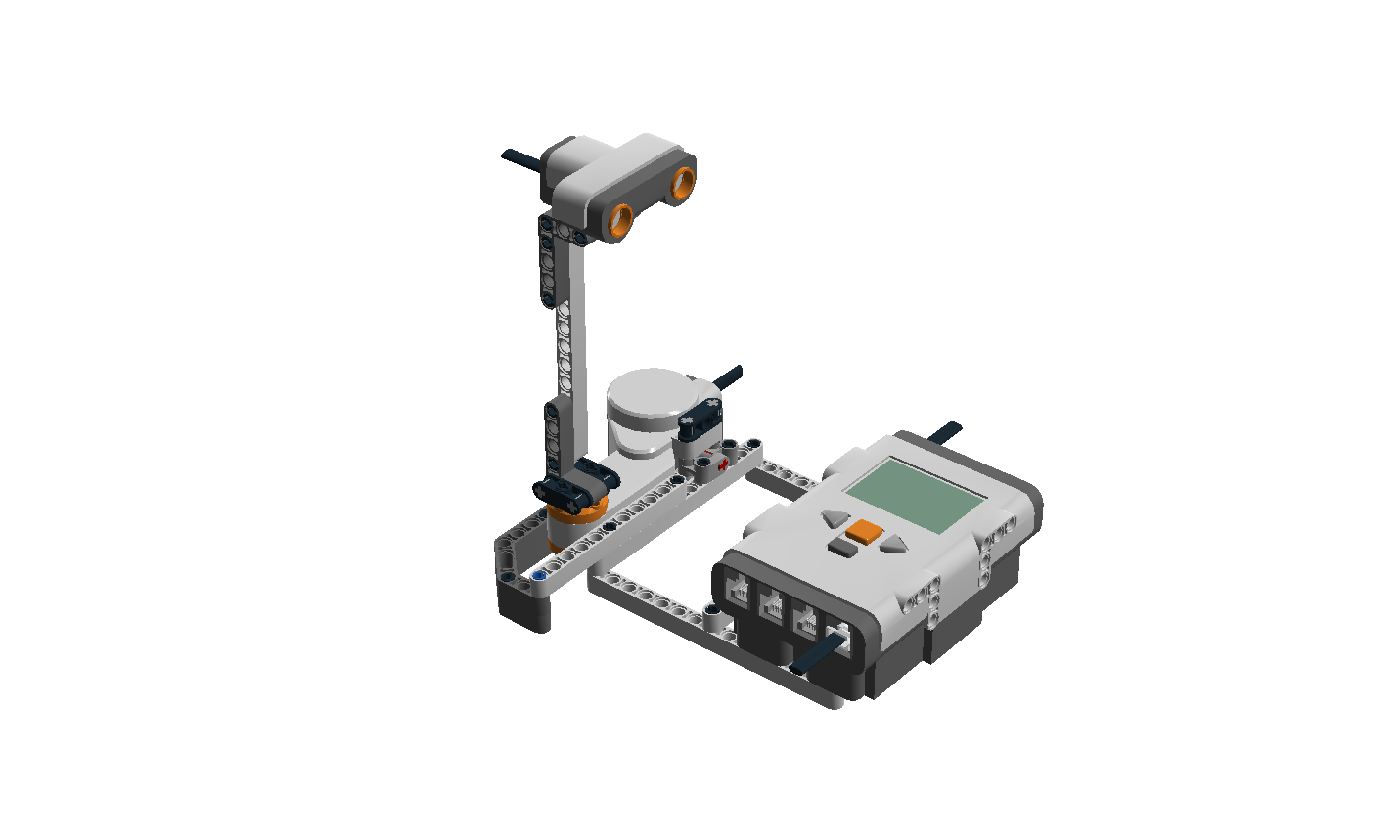 |
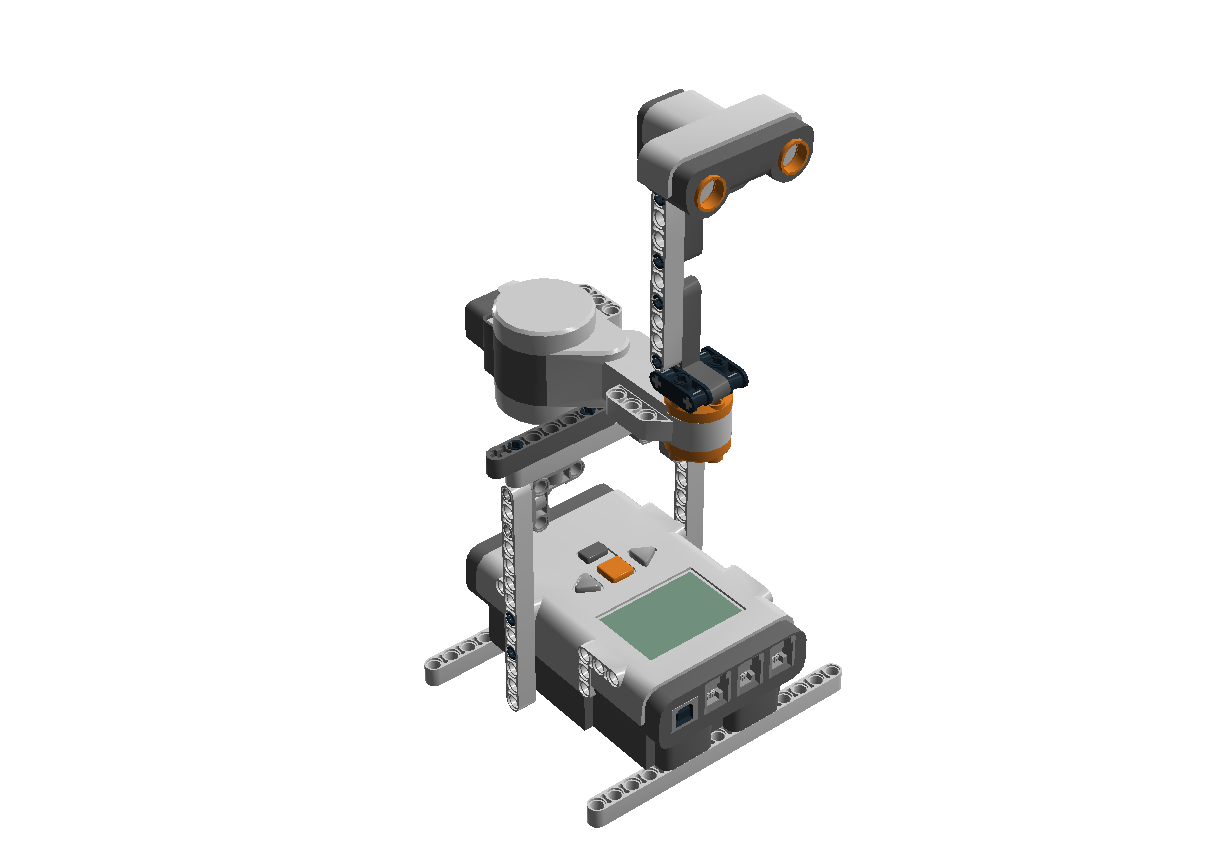
| Instructions de montage |
 |
Pour ce faire il faut :
- Visual Studio(gratuit), pour dessiner l'image.
- Bricxcc, pour programmer le robot en NXC.
Le but est de faire tourner le sensor sur 360° en relevant la distance captée à chaque degrée. Ensuite convertir ces données en coordonées x et y pour tracer des points.
Les cours de géométrie de l'ecole sont loins, il a donc fallu chercher sur internet la formule pour calculer ces coordonnées.
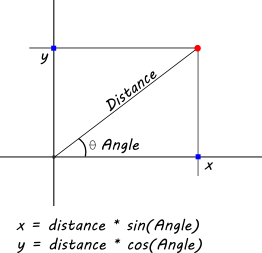
Le NXT calcule une distance, on connaitra l'angle puisque c'est nous qui le déterminons à chaque fois, pour avoir x et y il faut utiliser les coordonnées polaires.
x = distance x sin(angle)
y = distance x cos(angle)
Ci-dessous, le programme en NXC
Ci-dessous, le programme en VB.net, il faut une textbox (T1), 2 boutons, et une picturebox (PB)
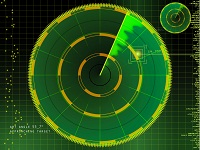
Et voici le résultat, les lignes les plus longues représente 2m55 :
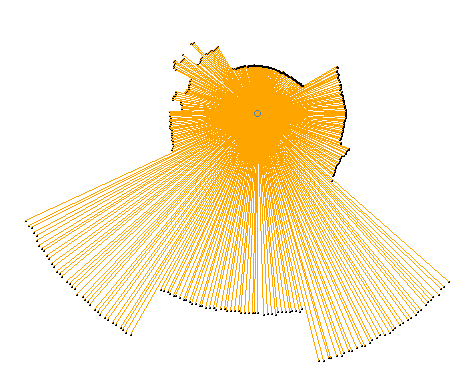
Ce projet est loin d'être parfait mais le résultat voulu est obtenu.
Le radar met pas mal de temps à tourner car il le fait degré par degré, ce qui met environ 1mn, ce temps peut être amélioré en essayant de faire tourner le radar en continu à vitesse constante et en prenant les mesures à un intervalle de temps régulier.
Mais dans ce cas il va falloir trouver un truc pour connaitre l'angle auquel on se trouve au moment de la mesure.